

")















Обоснование параметров работы роботизированного кассетного загрузочного устройства карусельного типа для селекционной сеялки
- Авторы: Чулков А.С.1, Чаплыгин М.Е.1, Шайхов М.М.1
-
Учреждения:
- Федеральный научный агроинженерный центр ВИМ
- Выпуск: Том 34, № 4 (2024)
- Страницы: 549-562
- Раздел: Технологии, машины и оборудование
- Статья получена: 03.09.2024
- Статья одобрена: 04.09.2024
- Статья опубликована: 23.12.2024
- URL: https://journals.rcsi.science/2658-4123/article/view/262906
- DOI: https://doi.org/10.15507/2658-4123.034.202404.549-562
- ID: 262906

Цитировать
Полный текст

Аннотация
Введение. Разработка и внедрение автоматизированных и роботизированных машин и устройств для выполнения работ в селекции и семеноводстве зерновых и других культур создают условия для повышения производительности и снижения трудоемкости работ, способствуют наращиванию объемов производства отечественного посевного материала. Для посева культур на втором этапе селекционных работ применяются кассетные сеялки, в которых используются специальные загрузочные устройства для подачи кассет с разделенными на порции семенами к автономным высевающим аппаратам, число которых соответствует числу ячеек в кассете. Роботизированное кассетное загрузочное устройство селекционных сеялок предназначено для последовательного перемещения кассет с семенным материалом к высевающим аппаратам и подачи блоков кассет в рабочую зону по заданной программе при выполнении технологического процесса посева на делянках селекции зерновых, зернобобовых и других культур. При этом должно быть обеспечено строгое согласование работы роботизированного кассетного загрузочного устройства и высевающих аппаратов сеялки, а для этого необходимо обосновать конструкционно-технологические параметры загрузочного устройства с учетом его строения.
Цель исследования. Проанализировать работу роботизированного кассетного загрузочного устройства карусельного типа в системе взаимодействия рабочих органов сеялки при выполнении технологического процесса посева культур на селекционных делянках и обосновать его параметры для загрузки высевающих аппаратов селекционной сеялки.
Материалы и методы. Для определения параметров устройства использовали физико-математические зависимости, описывающие его работу в различных режимах при выполнении селекционного посева зерновых и других культур на втором этапе работ.
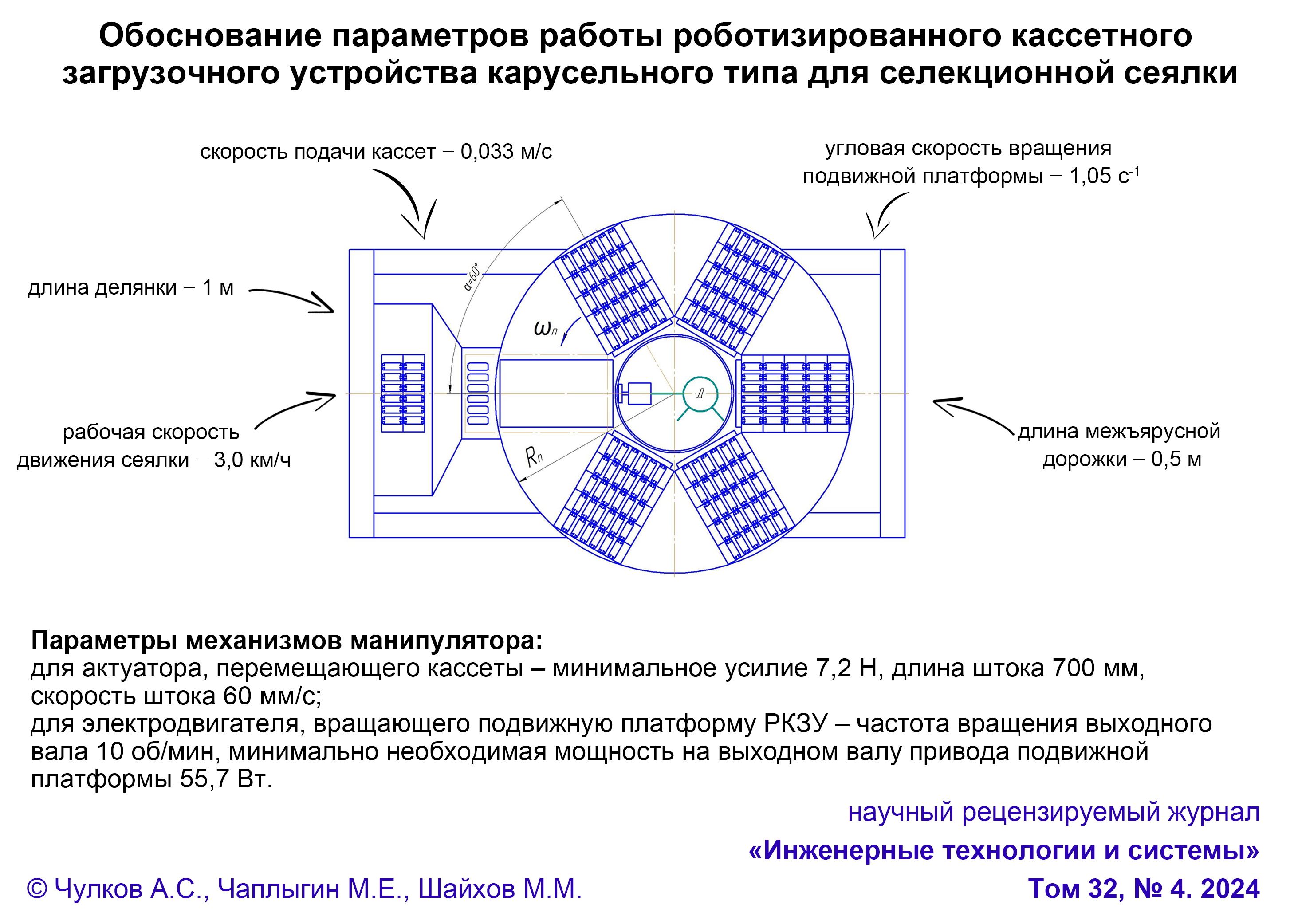
Результаты исследования. Обосновали параметры роботизированного кассетного загрузочного устройства карусельного типа для двух режимов работы: подачи кассет в рабочей зоне к выгрузным отверстиям рабочего стола и подачи блока кассет в рабочую зону. Рассчитаны параметры механизмов манипулятора: для актуатора, перемещающего кассеты, минимальное усилие составляет 7,2 Н, длина штока – 700 мм, скорость штока – 60 мм/с; для электродвигателя, вращающего подвижную платформу устройства, частота вращения выходного вала составляет 10 об/мин, минимально необходимая мощность на выходном валу привода подвижной платформы – 55,7 Вт.
Обсуждение и заключение. Определены конструкционно-технологические параметры роботизированного кассетного загрузочного устройства карусельного типа для загрузки высевающих аппаратов селекционной сеялки на втором этапе селекционных работ. Проведен расчет скорости подачи кассет, которая составляет 0,033 м/с во время основной операции выполнения посева для исходных параметров: рабочей скорости движения сеялки 3,0 км/ч, длины делянки 1 м и длины межъярусной дорожки 0,5 м. Для режима подачи блока кассет рассчитали угловую скорость вращения подвижной платформы (1,05 с–1), при которой подача блока кассет будет происходить за 1 с.
Полный текст
Введение
Для выполнения работ в селекции и семеноводстве зерновых и других культур в сельскохозяйственном производстве осуществляется создание и распространение автоматизированных и роботизированных машин и устройств, что приводит к повышению производительности и снижению трудоемкости работ, способствует наращиванию объемов производства отечественного посевного материала. Разработка и применение новых селекционных сеялок с элементами роботизации технологического процесса должны обеспечить более качественное выполнение посева зерновых и других культур в селекционных и семеноводческих питомниках, уменьшение трудоемкости посева делянок [1–3].
Кассетные сеялки применяются для посева культур на 2-м этапе селекционных работ. Они имеют специальные загрузочные устройства для подачи кассет с разделенным на порции высеваемым материалом (семенами) к автономным высевающим аппаратам, число которых соответствует числу ячеек в кассете и общему числу рядков на делянке. Роботизированное кассетное загрузочное устройство (РКЗУ) селекционных сеялок предназначено для последовательного перемещения кассет с семенным материалом к высевающим аппаратам сеялки и подачи блоков кассет в рабочую зону по заданной программе при выполнении технологического процесса посева на делянках селекции зерновых, зернобобовых и других культур.
Целью исследования является анализ работы РКЗУ карусельного типа для загрузки высевающих аппаратов селекционной сеялки в системе взаимодействия рабочих органов сеялки при выполнении технологического процесса посева зерновых и других культур на селекционных делянках, а также обоснование параметров РКЗУ для основных режимов его работы.
Обзор литературы
На 2-м этапе селекции зерновых и зернобобовых культур для выполнения технологии посева применяют кассетные селекционные сеялки с порционными высевающими аппаратами автономного высева [4–6]. В конструкции указанных аппаратов применяется конус для равномерного распределения подаваемой в устройство порции семян вдоль его основания. При выполнении посева каждая порция семян равномерно распределяется вдоль отдельного рядка засеваемой делянки. Загрузка семян в конусные высевающие аппараты осуществлялась при помощи кассетного загрузочного устройства, перестановку блоков кассет в которых осуществлял оператор вручную [7–9]. Для загрузки высевающих аппаратов семенами предложено применять РКЗУ карусельного типа, что позволит повысить производительность сеялки по сравнению с ранее применявшимися сеялками с кассетным загрузочным устройством и снизить трудоемкость за счет сокращения ручного труда при работе РКЗУ [10–12].
РКЗУ может быть интегрировано как в отечественные кассетные сеялки (типа СКС-6-10, CCCэ-6 и др.1), так и в сеялки зарубежной разработки компаний Wintersteiger Ag (Австрия), Haldrup (Германия) и др. [13–15].
Материалы и методы
Обоснование параметров РКЗУ карусельного типа провели с использованием физико-математического аппарата [16–18].
На основе принципиальной схемы (рис. 1) устройства по патенту РФ на изобретение № 2806909 разработаны алгоритм работы РКЗУ (рис. 2) и схемы для расчета параметров РКЗУ для двух режимов его работы (рис. 3, 4) [14].
Конструкционно-технологическая схема РКЗУ карусельного типа разработана в соответствии с ГОСТ Р 60.0.0.4-2019/ИСО 8373:20122 и ОСТ 46 73-783. При разработке схемы устройства применили структурный подход, основанный на разбиении роботизированного устройства на блоки по функциональному признаку, когда каждый блок выполняет отдельную функцию4.
Результаты исследования
Роботизированное кассетное устройство для загрузки высевающих аппаратов предназначено для установки на селекционную сеялку с целью посева зерновых, зернобобовых и других культур на 2-м этапе селекционных работ [9; 14; 15]. Согласно ОСТ 46 73-78 на данном этапе работ длина делянки Lд составляет от 1 до 5 м, длина межъярусной дорожки Lмя – не более 2 м.
Схема устройства по патенту РФ на изобретение № 2806909 «Роботизированное кассетное загрузочное устройство карусельного типа селекционной сеялки» [14] представлена на рисунке 1.
РКЗУ карусельного типа работает в двух режимах в соответствии с алгоритмом (рис. 2):
– режим подачи кассет в рабочей зоне к выгрузным отверстиям рабочего стола (поступательное движение кассет);
– режим подачи блока кассет в рабочую зону (вращательное движение подвижной платформы с установленными на ней блоками кассет).
Определение конструктивно-технологических параметров для режима подачи кассет в рабочей зоне к выгрузным отверстиям. Схема для расчета параметров подачи кассет к выгрузным отверстиям представлена на рисунке 3.

Р и с. 1. Принципиальная схема РКЗУ карусельного типа (вид сбоку и сверху): 1 – кассета с ячейками для высеваемого материала; 2 – высевающий аппарат; 3 – направляющая пластина; 4 – кассетный блок; 5 – блок управления; 6 – рама; 7 – центральная неподвижная платформа; 8 – внешняя подвижная платформа; 9 – актуатор; 10 – электродвигатель привода актуатора; 11 – рабочая зона перемещения кассет; 12 – электродвигатель привода внешней подвижной платформы; 13 – контейнер для сбора пустых кассет; 14 – рабочий стол с выгрузными отверстиями; 15 – наклонный лоток для спуска пустых кассет; 16 – привод высевающего аппарата
F i g. 1. Schematic diagram of a carousel-type robotic cassette loading device (RCLD) (top and side views): 1 – cassette with cells for the material to be sown; 2 – sowing device; 3 – guide plate; 4 – cassette block; 5 – control unit; 6 – frame; 7 – central fixed platform; 8 – external movable platform; 9 – actuator; 10 – actuator drive electric motor; 11– operation area for moving cassettes; 12 – electric motor for driving the external moving platform; 13 – container for collecting empty cassettes; 14 – work table with discharge outlets; 15 – inclined tray for lowering empty cassettes; 16 – sowing device drive
Примечание: Д – электродвигатель; ПР – привод.
Note: Д – electric motor; ПР – drive.
Источник: рисунок составлен авторами статьи по материалам патента на изобретение № 2806909 [14].
Source: the diagram is compiled by the authors of the article based on the materials of the patent for invention No. 2806909 [14].

Р и с. 2. Алгоритм работы РКЗУ карусельного типа
F i g. 2. Algorithm of operation of a RCLD of a carousel type
Источник: здесь и далее рисунки составлены авторами статьи.
Source: hereinafter in this article the diagrams are compiled by the authors of the article.

Р и с. 3. Схема для расчета параметров подачи кассет к выгрузным отверстиям
F i g. 3. Scheme for calculating the parameters for feeding cassettes to the discharge autlets
Операцию подачи кассет в рабочей зоне к выгрузным отверстиям разделили на три: основную и две вспомогательных.
Первая вспомогательная операция предшествует началу посева и выполняется до движения сеялки по делянке, при этом должно быть обеспечено перемещение кассет штоком актуатора:
Lв1 = Lо.ш. + Lу.п.+ Lр.с.,
где Lо.ш. – длина перемещения штока актуатора от исходного положения в пределах центральной неподвижной платформы до начала рабочей зоны, равная величине его отвода от начала рабочей зоны до исходного положения во избежание столкновения со следующим подаваемым в рабочую зону блоком кассет, Lо.ш. ≥ 100 мм; Lу.п. – длина переходного участка платформы между направляющей пластиной и рабочим столом, Lу.п. ≤ 50 мм; Lр.с. – длина рабочего стола с выгрузными отверстиями, Lр.с.= 225 мм. Примем Lв1 = 100 + 50 + 225 = 375 мм.
Основная операция подачи кассет в рабочей зоне к выгрузным отверстиям, под усилием штока актуатора, происходит во время прохождения сеялкой нескольких делянок и межъярусных дорожек. При этом крайняя, контактирующая со штоком, кассета перемещается во время операции посева на расстояние:
Lо.п.= B · m,
где B – ширина кассеты, В = 60 мм = 0,06 м; m – количество кассет в блоке для представленной конструкции, m = 5 шт. Тогда Lо.п.= 60 · 5 = 300 мм.
Вторая вспомогательная операция включает в себя возврат штока актуатора в исходное положение перед подачей следующего блока кассет с семенами. При этом шток перемещается на величину:
Lв2 = Lр.с. + Lу.п. + Lо.п + Lо.ш.. (1)
По формуле (1): Lв2 = 225 + 50 + 300 + 100 = 675 мм.
Необходимая длина выдвижения штока Lш определяется величиной Lв2 = 675 мм и расположением корпуса актуатора на неподвижной платформе. Приняли Lш = 700 мм.
Оценка усилия на передвижение кассет по направляющей пластине и другим элементам конструкции РКЗУ. При выполнении основной операции подачи кассет с семенами в рабочей зоне к выгрузным отверстиям кассеты скользят по направляющей пластине и далее по участкам подвижной платформы и рабочего стола.
Необходимое усилие Fп.к., H, на передвижение кассет можно определить с помощью оценки силы трения Fтр, Н, скольжения по формуле:
Fп.к. ≈ Fтр = μABS ∙N, (2)
где μABS – коэффициент трения скольжения (материал кассет, направляющих пластин, подвижной платформы РКЗУ и рабочего стола – ABS-пластик; приняли μABS = 0,54); N – нормальная реакция опоры, H:
N = mб.к. ∙ g, (3)
где mб.к. – масса пяти загруженных семенами кассет, mб.к. = 1,36 кг; g – ускорение свободного падения, g ≈ 9,81 м/с2.
Из формулы (2), с учетом (3), определили оценку усилия на передвижение кассет с семенами при их подаче к выгрузным отверстиям: Fп.к. ≈ 7,2 Н.
Определение необходимой скорости подачи кассет при непрерывном движении по направляющей пластине к выгрузным отверстиям рабочего стола. Указанная величина должна быть согласована с рабочей скоростью движения сеялки по делянке и межъярусной дорожке и работой высевающего аппарата.
Учитывали, что рабочая скорость движения сеялки vс по делянке варьируется (для сеялки СКС-6-10 рекомендуемая скорость 1,15 км/ч согласно ТУ 46-16-466-83, для сеялки СССэ-6 – до 3,0 км/ч) [8]. Приняли указанные значения скоростей для дальнейших исследований конструктивно-технологических параметров РКЗУ карусельного типа.
Выполнили расчет скорости подачи кассет для значений исходных параметров: минимальной длины делянки Lд = 1 м (согласно ОСТ 46 73-78); длины межъярусной дорожки Lмя = 0,5 м; максимальной рабочей скорости движения сеялки vс = 3,0 км/ч ≈ 0,83 м/с. При большей длине делянок и межъярусных дорожек и меньшей рабочей скорости движения сеялки во время выполнения основной операции посева для обеспечения работы РКЗУ на посеве 2-го этапа селекционных работ (согласно ОСТ 46 73-78) скорость перемещения штока актуатора (подачи кассет) может быть меньше.
Параметры работы высевающего аппарата сеялки и подачи кассет РКЗУ должны быть согласованы по времени. Время засева делянки:
tд = Lд / vс. (4)
При длине делянки Lд = 1 м по формуле (4) получили: tд = 1 / 0,83 ≈ 1,2 с.
Время прохождения сеялкой межъярусной дорожки:
tмя = Lмя / vс. (5)
При длине межъярусной дорожки Lмя = 0,5 м по формуле (5):
tмя = 0,5 / 0,83 ≈ 0,6 с.
Суммарное время засева делянки и прохождения сеялкой межъярусной дорожки:
tд.мя = tд + tмя. (6)
По формуле (6): tд.мя ≈ 1,2 + 0,6 = 1,8 с.
Скорость подачи кассеты во время основной операции подачи кассет в рабочей зоне к выгрузным отверстиям при прохождении сеялкой делянки и межъярусной дорожки:
vп.к.= B / tд.мя,
где В – длина пути прохождения кассеты к выгрузным отверстиям, равная ширине кассеты, В = 60 мм = 0,06 м. Тогда vп.к.= 0,06 / 1,8 = 0,033 м/с.
Выдвижение и возврат штока в исходное положение на вспомогательных операциях во время остановки сеялки необходимо выполнять максимально быстро, чтобы время остановки было минимальным. При этом скорость выдвижения и возврата штока vв.ш. на вспомогательных операциях должна удовлетворять условию:
vв.ш. ≥ vп.к.. (7)
Поэтому с учетом условия (7) для расчетов приняли vв.ш. = 60 мм/c. При этой скорости возврат штока в исходное положение при перемещении на Lв2 = 675 мм происходит за время tв.ш. ≈ 11,3 с.
Актуатор для перемещения кассет подбирается по следующим основным параметрам: усилию 7,2 Н; длине штока Lш = 700 мм; скорости выдвижения и возврата штока vв.ш. = 60 мм/с.
Определение параметров для режима подачи блока кассет в рабочую зону при вращении подвижной платформы РКЗУ карусельного типа. Усилие Fп сопротивления вращению подвижной платформы оценили по формуле:
Fп= µ·Nп , (8)
где μ – коэффициент трения стального вала электродвигателя в опоре, на которой закреплена подвижная платформа, μ = 0,3; Nп – нормальная реакция опоры подвижной платформы с установленными на ней блоками кассет с семенами, Н:
Nп = mп·g, (9)
где mп – масса подвижной платформы с установленными на ней блоками кассет с семенами, кг; mп = 30,0 кг; g – ускорение свободного падения, м/с2, g = 9,81 м/с2.
По формуле (8), с учетом (9), получили: Fп = 88,29 Н.
Схема для расчета параметров в режиме подачи блока кассет представлена на рисунке 4.

Р и с. 4. Схема для расчета параметров РКЗУ карусельного типа для режима подачи блока кассет при вращении подвижной платформы (вид сбоку и сверху)
F i g. 4. Scheme for calculating the parameters of a carousel-type RCLD for the feeding mode of a cassette block during rotation of the moving platform (top and side views)
По команде блока управления подвижная платформа должна начать вращение и переместить блоки кассет на один шаг – угол α = 60° (при равномерном распределении блоков кассет вдоль края подвижной платформы для шестиблочного РКЗУ карусельного типа).
Поворот платформы на один шаг необходимо выполнять максимально быстро, чтобы время остановки сеялки было минимальным. Приняли время подачи нового заполненного семенами блока кассет в рабочую зону tп.п. = 1 с. При этом частота выходного вала электродвигателя (вращения подвижной платформы) nп, об/с определяется по формуле:
nп = (tп.п.)–1 / 6. (10)
Получено по формуле (10): nп ≈ 0,167 об/с (соответствует 10 об/мин).
Угловая скорость на выходном валу привода ωп, с–1:
ωп = 2·π·nп. (11)
По формуле (11): ωп ≈ 2·3,14·0,167 ≈ 1,05 с–1.
Мощность на выходном валу привода подвижной платформы определяли по формуле:
Nпр = Мпр · ωп, (12)
где Mпр – крутящий момент на выходном валу привода, Н·м; ωп – угловая скорость вращения выходного вала привода (платформы РКЗУ), с–1.
Крутящий момент на выходном валу привода рассчитали по формуле:
Мпр = Fп·Rп, (13)
где Fп – усилие сопротивления вращению подвижной платформы, Н; Rп – внешний радиус подвижной платформы, м; Rп = 0,6 м.
По формулам (12) и (13) получили:
Mпр = 88,29·0,6 ≈ 53,0 Н·м;
Nпр = 53,0·1,05 ≈ 55,7 Вт.
По численному значению Nпр, по каталогу выбирается величина Nн – номинальная мощность электродвигателя, исходя из условия Nпр ≤ Nн.
Таким образом, рассчитаны параметры для электродвигателя, вращающего подвижную платформу РКЗУ с шагом 60°, – частота вращения вала 10 об/мин, угловая скорость 1,05 с–1.
Обсуждение и заключение
Определены конструкционно-технологические параметры РКЗУ карусельного типа для загрузки высевающих аппаратов селекционной сеялки на 2-м этапе селекционных работ. Проведен расчет скорости подачи кассет 0,033 м/с во время основной операции выполнения посева для исходных параметров – рабочей скорости движения сеялки 3,0 км/ч, длины делянки 1 м и длины межъярусной дорожки 0,5 м. Для режима подачи блока кассет определили угловую скорость вращения подвижной платформы, равную 1,05 с–1, при которой подача блока кассет будет происходить за 1 с. Рассчитаны параметры механизмов манипулятора: для актуатора, перемещающего кассеты, минимальное усилие 7,2 Н, длина штока 700 мм, скорость штока 60 мм/с; для электродвигателя, вращающего подвижную платформу РКЗУ, частота вращения выходного вала 10 об/мин, минимально необходимая мощность на выходном валу привода подвижной платформы 55,7 Вт.
1 Анискин В. И., Некипелов Ю. Ф. Механизация опытных работ в селекции, сортоиспытании и первичном семеноводстве зерновых и зернобобовых культур. М. : ВИМ, 2004. 200 с.
2 ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012. Роботы и робототехнические устройства. Термины и определения. М. : Стандартинформ, 2019. 31 с. URL: https://meganorm.ru/Data/707/70723.pdf (дата обращения: 12.06.2024).
3 ОСТ 46 73-78. Рекомендации по применению терминов и определений в области механизации работ в селекции, сортоиспытании и первичном семеноводстве зерновых и зернобобовых культур. М. : Колос, 1979. 32 с.
4 Проектирование роботов и робототехнических систем : учебное пособие / В. Х. Пшихопов [и др.]. Ростов-на-Дону : Изд-во ЮФУ, 2014. 196 с.
Дополнительная информация
Конфликт интересов: авторы заявляют об отсутствии конфликта интересов.
Благодарности: авторы выражают признательность анонимным рецензентам.
Заявленный вклад авторов:
А. С. Чулков – формулирование основных целей и задач исследования, составление начального варианта статьи, формирование общих выводов.
М. Е. Чаплыгин – доработка текста и оформление материалов, анализ литературных источников, формирование общих выводов, итоговая доработка статьи.
М. М. Шайхов – методология, анализ литературных источников, формирование общих выводов, итоговая доработка статьи.
Об авторах
Андрей Сергеевич Чулков
Федеральный научный агроинженерный центр ВИМ
Email: andrei.chulkov@mail.ru
ORCID iD: 0009-0002-1178-451X
SPIN-код: 1726-9749
ResearcherId: JOZ-1910-2023
Кандидат технических наук, ведущий научный сотрудник лаборатории технологий и машин для посева и уборки зерна и семян в селекции и семеноводстве
Россия, 109428, г. Москва, 1-й Институтский проезд, д. 5Михаил Евгеньевич Чаплыгин
Федеральный научный агроинженерный центр ВИМ
Email: misha2728@yandex.ru
ORCID iD: 0000-0003-0031-6868
SPIN-код: 2268-6927
Scopus Author ID: 57211741695
ResearcherId: AAZ-6056-2020
https://elibrary.ru/author_profile.asp?authorid=668532
Кандидат технических наук, ведущий научный сотрудник, заведующий лабораторией технологий и машин для посева и уборки зерна и семян в селекции и семеноводстве
Россия, 109428, г. Москва, 1-й Институтский проезд, д. 5Марсель Марселевич Шайхов
Федеральный научный агроинженерный центр ВИМ
Автор, ответственный за переписку.
Email: mars.shaihov@yandex.ru
ORCID iD: 0009-0008-9959-8474
SPIN-код: 1076-9502
Ведущий специалист лаборатории технологий и машин для посева и уборки зерна и семян в селекции и семеноводстве
Россия, 109428, г. Москва, 1-й Институтский проезд, д. 5Список литературы
- Лобачевский Я. П., Дорохов А. С. Цифровые технологии и роботизированные технические средства для сельского хозяйства // Сельскохозяйственные машины и технологии. 2021. Т. 15, № 4. С. 6–10. EDN: YFRZDV
- Измайлов А. Ю. Интеллектуальные технологии и роботизированные средства в сельскохозяйственном производстве // Вестник Российской академии наук. 2019. Т. 89, № 5. С. 536–538. https://doi.org/10.31857/S0869-5873895536-538
- Жалнин Э. В. Семеноводство России – приоритет импортозамещения // Сельский механизатор. 2016. № 3. URL: https://selmech.msk.ru/316.html (дата обращения: 17.04.2024).
- Несмиян А. Ю., Ценч Ю. С. Тенденции и перспективы развития отечественной техники для посева зерновых культур // Сельскохозяйственные машины и технологии. 2018. Т. 12, № 3. С. 45–52. https://doi.org/10.22314/2073-7599-2018-12-3-45-52
- Автоматизированные технические средства в посевной технике для селекции и семеноводства сельхозкультур / А. Х. Текушев [и др.] // Электротехнологии и электрооборудование в АПК. 2022. Т. 69, № 3. С. 49–55. EDN: SEESLE
- Измайлов А. Ю., Евтюшенков Н. Е. Приоритетная техника для селекции и первичного семеноводства // Сельский механизатор. 2017. № 3. URL: http://www.selmech.msk.ru/317.html (дата обращения: 17.04.2024).
- Кассетные загрузочные устройства для высевающих аппаратов селекционных сеялок / А. С. Чулков [и др.] // Электротехнологии и электрооборудование в АПК. 2023. Т. 70, № 2. С. 74–81. EDN: TUJELT
- Lavrov A., Smirnov I., Litvinov M. Justification of the Construction of a Self-Propelled Selection Seeder with an Intelligent Seeding System // MATEC Web of Conferences. 2018. Vol. 224. Article no. 05011. https://doi.org/10.1051/matecconf/201822405011
- Чулков А. С., Шибряева Л. С. Параметры кассеты для роботизированного загрузочного устройства селекционной сеялки // Сельскохозяйственные машины и технологии. 2024. Т. 18, № 2. С. 92–97. https://doi.org/10.22314/2073-7599-2024-18-2-92-97
- Жалнин Э. В. Возродим селекцию и семеноводство // Сельский механизатор. 2014. № 7. С. 4–5. EDN: SVKVRH
- Научно-технические достижения агроинженерных научных учреждений для производства основных групп сельскохозяйственной продукции / Ю. Ф. Лачуга [и др.] // Техника и оборудование для села. 2021. № 4 (286). С. 2–11. EDN: LAQWUU
- Лобачевский Я. П. Научное обеспечение приоритетных технологий агропромышленного комплекса Российской Федерации // Вестник Российской академии наук. 2024. Т. 94, № 3. С. 275–282. EDN: GFXGCD
- Инновационные достижения агроинженерных научных учреждений в условиях развития цифровых систем в сельском хозяйстве / Я. П. Лобачевский [и др.] // Техника и оборудование для села. 2024. № 5(323). С. 2–9. EDN: IZLBHP
- Роботизированное кассетное загрузочное устройство карусельного типа для селекционной сеялки : патент 2806909 Российская Федерация / Чулков А. С., Чаплыгин М. Е., Шайхов М. М. № 2023112652 ; заявл. 25.05.2023 ; опубл. 08.11.2023. EDN: GBKTEM
- Чулков А. С., Шайхов М. М. Роботизированное кассетное загрузочное устройство конвейерного типа для селекционной сеялки // Техника и оборудование для села. 2024. № 6 (324). С. 20–22. EDN: ZMIJSQ
- Yaropud V., Datsiuk D. By Improving Breeding Seeder Sowing Device Small Seeded Crops // Vibrations in Engineering and Technology. 2021. No.1. P. 152–162. https://doi.org/10.37128/2306-8744-2021-1-15
- Theory of Movement of the Combined Seeding Unit / H. Beloev [et al.] // Agriculture and Agricultural Science Procedia. 2015. Vol. 7. P. 21–26. https://doi.org/10.1016/j.aaspro.2015.12.024
- Современные физические методы и технологии в сельском хозяйстве / С. В. Гудков [и др.] // Успехи физических наук. 2024. Т. 194, № 2. С. 208–226. EDN: QINIEQ
Дополнительные файлы

